Unconditional Stability and Potential Instability in RF Amplifier Design
Stability analysis is an integral part of RF design. Learn the basics of stability analysis, including how to determine whether a device is unconditionally stable or potentially unstable.
If you’re designing an active RF circuit, you should always start with a thorough stability analysis. In this article, we’ll learn about basic concepts related to stability analysis, including input and output stability circles. We’ll also learn how the arrangement of these circles on a Smith chart can produce either unconditionally stable or potentially unstable devices.
First, though, why is stability analysis so important?
Why We Need Stability Analysis
At high frequencies, unavoidable parasitic effects can easily make the circuit oscillate. For example, a poor grounding scheme can cause coupling between different stages of a multi-stage amplifier and lead to instability.
Also, some circuits in the RF signal chain might not have a well-defined source or load impedance. For example, the low noise amplifier (LNA) in a receiver needs to interface with the outside world through the antenna. The impedance of the antenna can change if the user brings their hand close to the antenna, so the LNA must remain stable for all possible values of the source impedance at all frequencies.
Sometimes instability can have strange indications, like abrupt changes in the DC parameters of the amplifier, or high sensitivity of the circuit to its surroundings. This can make conducting a properly thorough stability analysis a challenging, intricate task.
Single-Stage RF Amplifier
Figure 1 shows the basic layout of an RF amplifier.
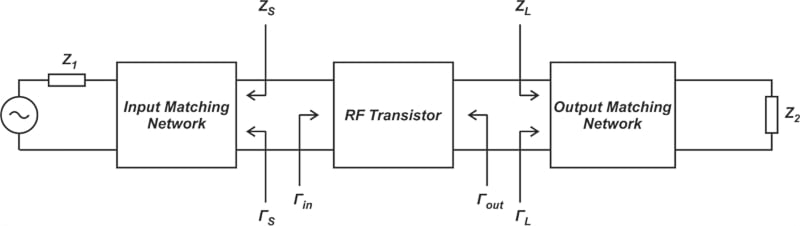
Figure 1. Diagram of a basic single-stage RF amplifier.
In the diagram above, matching networks are used on both sides of the transistor to transform input impedance (Z1) and output impedance (Z2) to the desired values ZS and ZL. The subscripts S and L denote, respectively, source and load.
In order to examine the circuit’s stability, we’ll model the active device as a two-port network (Figure 2). This two-port network will be characterized through its S-parameters and connected to impedances presented by the input and output matching networks ZS and ZL.
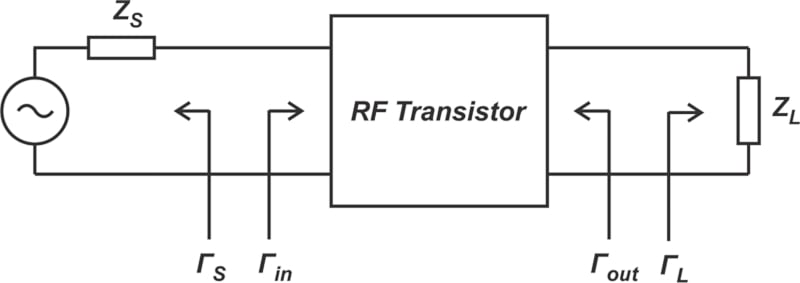
Figure 2. The circuit used to analyze the stability of an RF amplifier.
Using signal flow graph analysis, we can derive expressions for the reflection coefficients, ΓIN and ΓOUT, in terms of the transistor’s S-parameters:
$$\Gamma_{IN}~=~S_{11} + \frac{S_{12}S_{21} \Gamma_L}{1~-~S_{22}\Gamma_L}$$
Equation 1.
$$\Gamma_{OUT}~=~S_{22} + \frac{S_{12}S_{21} \Gamma_S}{1~-~S_{11}\Gamma_S}$$
Equation 2.
The above equations allow us to examine the stability of a two-port network. Remember that the magnitude of Γ is bounded between 0 and 1 for passive circuits. The reflected signal is therefore smaller than the incident signal. For an active device, however, the reflected signal can experience a gain rather than an attenuation.
In other words, for certain values of the S-parameters, the magnitude of the input and output reflection coefficients of an active device can be greater than unity (|ΓIN| > 1 and/or |ΓOUT| > 1). This can happen even though the source and load terminations of the transistor are passive (|ΓS| < 1 and |ΓL| < 1). Also, note that a reflection coefficient greater than unity corresponds to an impedance with negative real part. Oscillation is possible when either the input or output port produces a negative resistance.
Unconditional Stability and Potential Instability
A two-port network is said to be unconditionally stable if it can be connected to any source and load impedances without oscillations. In this context, we’re commonly referring to any passive source and load impedances—in other words, it’s assumed that |ΓS| < 1 and |ΓL| < 1. Thus, for an unconditionally stable transistor, the locus of the input and output reflection coefficients is the entire region inside of the Smith chart’s unit circle.
A transistor that is not unconditionally stable is usually described as a “potentially unstable” device. A potentially unstable device can become unstable for certain values of passive source and load impedances. Note that stability is frequency-dependent: a transistor might be unconditionally stable at a certain frequency range, but potentially unstable at a different frequency range. For that reason, the stability should be assessed at every frequency point where the transistor’s data is available.
In mathematical language, unconditional stability requires |ΓIN| < 1 and |ΓOUT| < 1. Therefore, we have:
$$|\Gamma_{IN}|~=~|S_{11} + \frac{S_{12}S_{21} \Gamma_L}{1~-~S_{22}\Gamma_L}|~<~1$$
Equation 3.
$$|\Gamma_{OUT}|~=~|S_{22} + \frac{S_{12}S_{21} \Gamma_S}{1~-~S_{11}\Gamma_S}~|~<1$$
Equation 4.
When the above conditions are satisfied, the real part of the impedance of the transistor’s input and output ports are positive for all passive source and load terminations. If these conditions are not met at a certain frequency, the transistor is potentially unstable at that frequency.
Input and Output Stability Circles
If we set |ΓIN| and |ΓOUT| equal to unity, we obtain equations that specify the boundary of instability:
$$|\Gamma_{IN}|~=~|S_{11} + \frac{S_{12}S_{21} \Gamma_L}{1~-~S_{22}\Gamma_L}|~=~1$$
Equation 5.
$$|\Gamma_{OUT}|~=~|S_{22} + \frac{S_{12}S_{21} \Gamma_S}{1~-~S_{11}\Gamma_S}|~=~1$$
Equation 6.
Equation 5 specifies all load reflection coefficients (ΓL) that make the magnitude of the input reflection coefficient equal to 1 (|ΓIN| = 1). Because this equation specifies the boundary for usable ΓL values, it should be plotted in the ΓL plane. By the same token, Equation 6 specifies the usable values of ΓS, so it should be plotted in the ΓS plane.
In their current forms, these equations are simple to interpret but difficult to work with. Fortunately, a bit of mathematical manipulation allows both equations to be put into the standard form for a circle equation. Equation 5 becomes:
$$|\Gamma_{L}~-~c_{L}|~=~r_L$$
Equation 7.
where cL denotes the center of the circle and rL denotes the circle’s radius.
To find cL, we use Equation 8:
$$c_L~=~\frac{ \big ( S_{22}~-~\Delta S_{11}^* \big )^*}{|S_{22}|^2~-~|\Delta|^2}$$
Equation 8.
Equation 9 gives us rL:
$$r_L~=~\Big | \frac{ S_{12} S_{21}}{|S_{22}|^2~-~|\Delta|^2} \Big |$$
Equation 9.
In the above equations, Δ is the determinant of the S-parameter matrix. It can be expressed as follows:
$$\Delta~=~S_{11}S_{22}~-~S_{12}S_{21}$$
Equation 10.
Since Equation 7 defines a circle that specifies the boundary for usable ΓL values, we refer to the above circle as the output stability circle.
Similarly, Equation 6 corresponds to a circle centered at cS:
$$c_S~=~\frac{ \big ( S_{11}~-~\Delta S_{22}^* \big )^*}{|S_{11}|^2~-~|\Delta|^2}$$
Equation 11.
and having radius rS:
$$r_S~=~\Big | \frac{ S_{12} S_{21}}{|S_{11}|^2~-~|\Delta|^2} \Big |$$
Equation 12.
Because it specifies the usable ΓS values, we call the circle produced by Equation 6 the input stability circle.
Example: Finding the Stability Circles
Table 1 gives the S-parameters for the Onsemi 2SC5226A NPN transistor at VCE = 5 V and IC = 7 mA.
Table 1. S-parameters for the 2SC5226A NPN transistor. Data used courtesy of Onsemi
|
Freq (MHz) |
|S11| |
∠ S11 |
|S21| |
∠ S21 |
|S12| |
∠ S12 |
|S22| |
∠ S22 |
|
100 |
0.720 |
–46.0 |
17.973 |
148.5 |
0.030 |
68.5 |
0.880 |
–23.6 |
|
200 |
0.612 |
–80.9 |
13.927 |
127.3 |
0.047 |
57.1 |
0.697 |
–37.6 |
|
400 |
0.497 |
–121.3 |
8.656 |
105.0 |
0.066 |
51.3 |
0.479 |
–47.6 |
|
600 |
0.456 |
–143.5 |
6.080 |
92.8 |
0.079 |
52.9 |
0.382 |
–50.5 |
|
800 |
0.440 |
–157.6 |
4.725 |
84.3 |
0.094 |
55.4 |
0.339 |
–51.8 |
|
1000 |
0.436 |
–167.5 |
3.864 |
77.0 |
0.110 |
56.8 |
0.323 |
–53.4 |
|
1200 |
0.434 |
–176.1 |
3.258 |
70.3 |
0.126 |
57.9 |
0.312 |
–55.8 |
|
1400 |
0.433 |
176.6 |
2.847 |
64.5 |
0.143 |
58.4 |
0.304 |
–58.3 |
|
1600 |
0.433 |
170.9 |
2.329 |
57.4 |
0.160 |
58.9 |
0.296 |
–62.0 |
|
1800 |
0.434 |
165.0 |
2.252 |
54.2 |
0.178 |
58.6 |
0.293 |
–65.0 |
|
2000 |
0.439 |
159.6 |
2.057 |
49.2 |
0.197 |
58.1 |
0.294 |
–68.1 |
Using this data, we’ll find the input and output stability circles at f = 100 MHz and determine the regions of stable operation. First, we’ll use the equations above to calculate the centers and radii of the stability circles. Below are the results.
f (MHz) = 100
|Δ| = 0.71
K = 0.19
cS = 25.37 ∠ 102.76 degrees
rS = 25.17
cL = 2.35 ∠ 58.43 degrees
rL = 1.94
Figure 3 shows the input stability circle plotted on the Smith chart. Its radius is so large compared to the unit circle of the Smith chart that, at first glance, the stability circle resembles a straight line.

Figure 3. Input stability circle for the NPN transistor from Table 1.
If the device were unconditionally stable, we could choose any source impedance (any point on the Smith chart) without producing an unstable operation. However, because the input stability circle intersects the Smith chart, there are passive input terminations that produce |ΓOUT| = 1. These passive terminations all lie on the input stability circle. Note that the input stability circle corresponds to the ΓS plane.
The perimeter of the stability circle specifies the boundary of instability. But is it the inside or the outside of the circle that represents the stable region of operation? The answer depends on the transistor’s S-parameters.
To determine the stable region, we can use the center of the Smith chart as a test point. Consider the following:
- At the center of the Smith chart, ΓS = 0.
- With ΓS = 0, Equation 6 produces |ΓOUT| = |S22|.
- From Table 1, we have |S22| = 0.88 at f = 100 MHz.
- Therefore, at the center of the Smith chart, |ΓOUT| = 0.88.
Since 0.88 is less than 1, the center of the Smith chart is in the stable region of operation. This means that the outside of the stability circle represents the values that produce a stable operation (the shaded area in Figure 4).
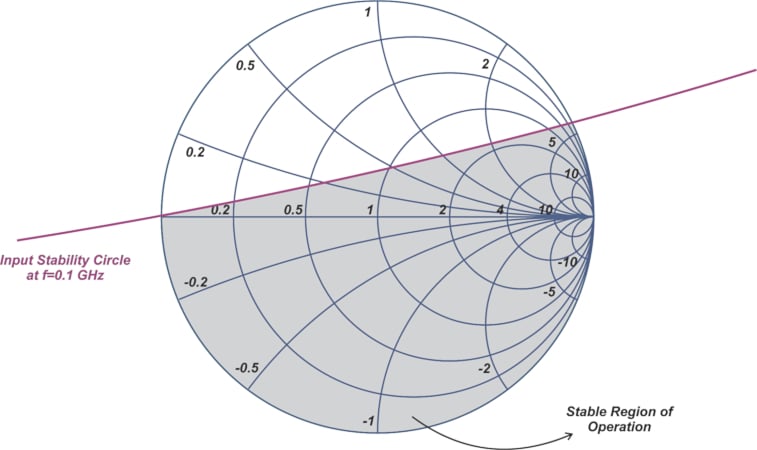
Figure 4. Stable region in the ΓS plane.
Similarly, we can plot the output stability circle on a Smith chart to determine the usable ΓL values, as demonstrated by Figure 5.
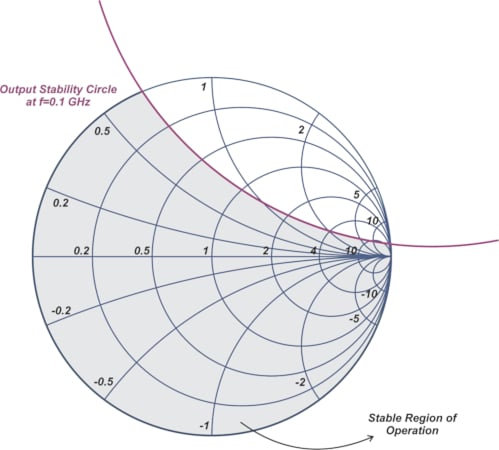
Figure 5. Stable region in the ΓL plane.
Once again, the center of the Smith chart is used as a test point to determine the stable region of operation. At the center of the Smith chart, ΓL = 0, and Equation 5 produces |ΓIN| = |S11|; from Table 1, we have |ΓIN| = |S11| = 0.72 at f = 100 MHz. Therefore, the center of the Smith chart belongs to the stable region of operation.
Possible Arrangements For a Potentially Unstable Device
There are several different ways a stability analysis can go wrong. To avoid them, we must exercise care in correctly interpreting the stability circles. In this section, we’ll take a look at some of the different possible arrangements.
When the stability circle intersects the Smith chart, the device is potentially unstable. In the above example, the magnitude of S11 and S22 was less than unity, so the center of the Smith chart produced a stable region of operation. When |S11| > 1 or |S22| > 1, the center of the Smith chart was in the unstable region of operation. Figure 6 shows the ΓL plane for this case.
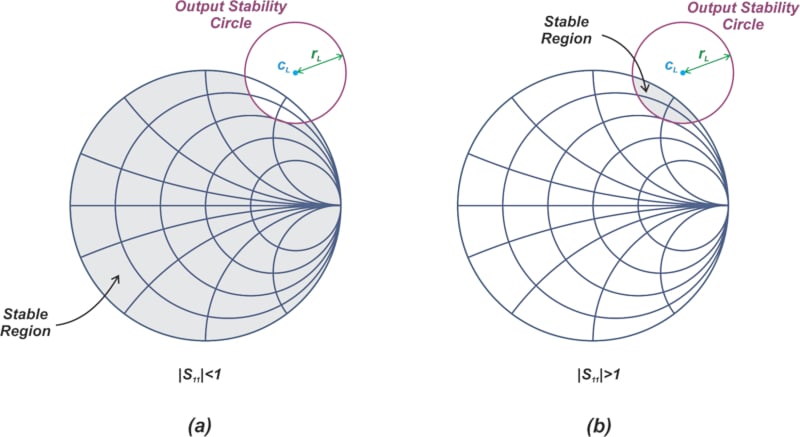
Figure 6. The stable region in the ΓL plane when either (a) |S11| < 1 or (b) |S11| > 1.
It is also possible for the intersecting stability circle to enclose the center of the Smith chart. This produces the two arrangements seen in Figure 7.

Figure 7. The stable regions when the stability circle encloses the center of the Smith chart, for (a) |S11| < 1 or (b) |S11| > 1.
The stability circle might also be entirely inside the Smith chart (Figure 8).

Figure 8. The stable regions when the stability circle both encloses the center of the Smith chart and is entirely inside the Smith chart. |S11| < 1 in Figure 8(a). |S11| > 1 in Figure 8(b).
As well as being inside the Smith chart, the stability circles in Figure 8 also enclose the Smith chart's center. However, it’s also possible for the stability circle to be inside the Smith chart and not enclose the chart's center.
Figures 6, 7, and 8 depicted output stability circles, which are plotted in the ΓL plane. Similar situations are also possible in the ΓS plane. Figure 9 illustrates a case where the input stability circle intersects the Smith chart but doesn’t enclose the center of the chart.

Figure 9. The stable region in the ΓS plane when (a) |S22| < 1 or (b) |S22| > 1.
We’ve shown the input and output stability circles in separate diagrams, but it’s common to plot both stability circles on one Smith chart. If we do this, we must be extra careful to make sure we’re using the correct circle when analyzing the circuit’s stability behavior.
Possible Unconditionally Stable Device Arrangements
In the above examples, some values of the termination produce an unstable operation. To have unconditional stability, the stability circle should either fall completely outside of the Smith chart or completely enclose the Smith chart. Figure 10 illustrates these two scenarios for the ΓL plane.

Figure 10. Two possible arrangements for an unconditionally stable device.
If either |S11| > 1 or |S22| > 1, the network cannot be unconditionally stable; in these cases, either the termination ΓL = 0 or ΓS = 0 leads to unstable operation.
Featured image used courtesy of Adobe Stock; all other images used courtesy of Steve Arar